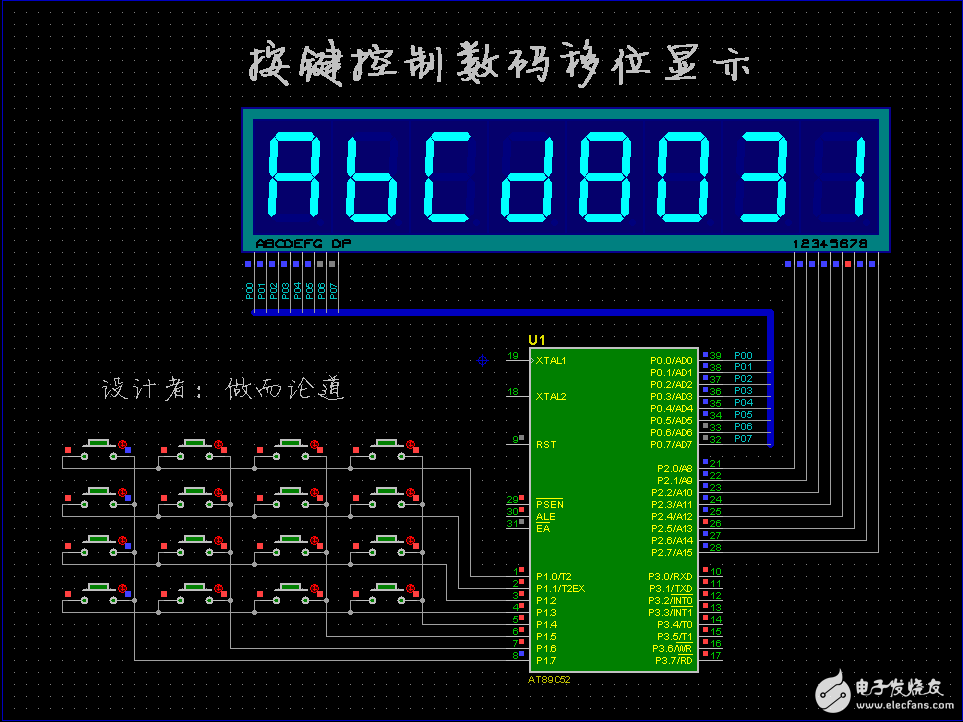
Requires 4 & TImes; 4 matrix keyboards, digital displays. The keyboard is connected to P1 and the digital display is connected to P0 and P2. The circuit and the display after the operation are as follows: The C language control program is as follows: //================================================ ======= #include Char disp_buff [] = {0, 0, 0, 0, 0, 0, 0, 0};//display buffer unit //------------------------------------------------ ------- Delay1ms(unsigned int t) //1ms delay function { Unsigned int i, j; For(i = 0; i "t; i++) for(j = 0; j "120; j++); } //------------------------------------------------ ------- Void display(void) //Display functions { Char code table[] = { // section number of common cathode digital tube 0x3f, 0x06, 0x5b, 0x4f, 0x66, 0x6d, 0x7d, 0x07, 0x7f, 0x6f, 0x77, 0x7c, 0x39, 0x5e, 0x79, 0x71}; Char code wei[] = {128, 64, 32, 16, 8, 4, 2, 1};//digit selection code Char i; For (i = 0; i "8; i++) { P2 = 0; //first blanking P0 = ~table[disp_buff [i]]; //Invert, used for the common Yang digital tube P2 = wei[i]; Delay1ms(2); } } //------------------------------------------------ ------- Unsigned char keyboard(void) //Scan keyboard function { Char i, j, temp, Buffer[4] = {0xef, 0xdf, 0xbf, 0x7f}; For(j = 0; j "4; j++) { // Loop scanning four lines P1 = Buffer[j]; // outputs a low level in the upper four bits, respectively Temp = 0x01; //plans to judge bit 0 first For(i = 0; i "4; i++) { // cyclically scanning four columns If(!(P1 & temp)) //From the lower four bits, take 1 bit Return (i + j * 4); // returns 0 if it is 0 Temp "" = 1; / / Judgment, left one } } Return 16; //Judge the end, no key press, return 16 } / / Oh, the substantive statement but 8 lines, is so concise! //------------------------------------------------ ------- Void main(void) { Unsigned char i, key; While(1) { // infinite loop Display(); //Show it again Key = keyboard(); //read out the keyboard If (key 16) { // if someone presses //--------------------Key processing Disp_buff[7] = disp_buff[6]; Disp_buff[6] = disp_buff[5]; Disp_buff [5] = disp_buff [4]; Disp_buff [4] = disp_buff [3]; Disp_buff [3] = disp_buff [2]; Disp_buff [2] = disp_buff [1]; Disp_buff[1] = disp_buff[0]; Disp_buff [0] = key; //--------------------End of processing, wait for key release For (i = 0; i "20; i++) display();//Slightly delayed While(key "16" { // Wait for key release Key = keyboard(); //read again Display(); // Don't forget to show } } } //Infinite loop } Motion Control Sensor is an original part that converts the change of non-electricity (such as speed, pressure) into electric quantity. According to the converted non-electricity, it can be divided into pressure sensor, speed sensor, temperature sensor, etc. It is a measurement, control instrument and Parts and accessories of equipment. Absolute Rotary Encoder,Absolute Linear Encoder,Absolute Optical Encoder,Absolute Position Encoder Changchun Guangxing Sensing Technology Co.LTD , https://www.gx-encoder.com