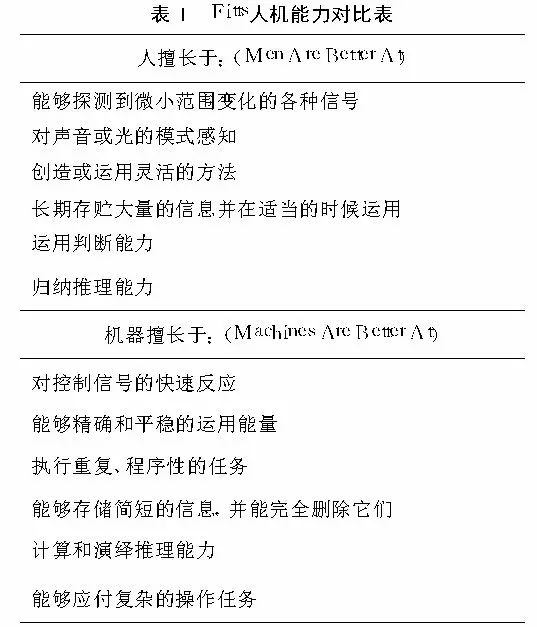
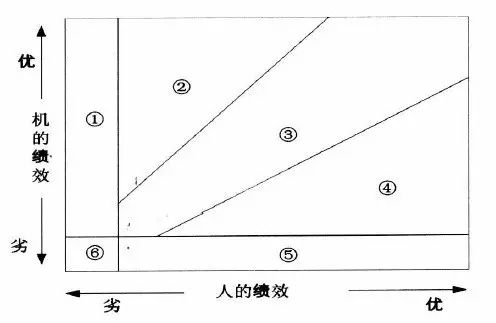
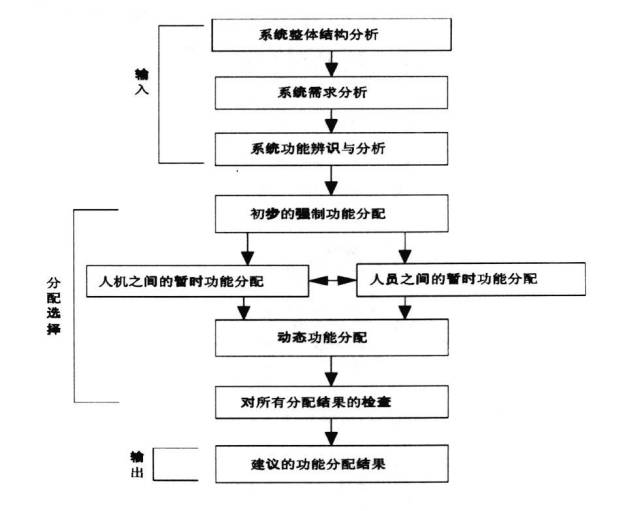
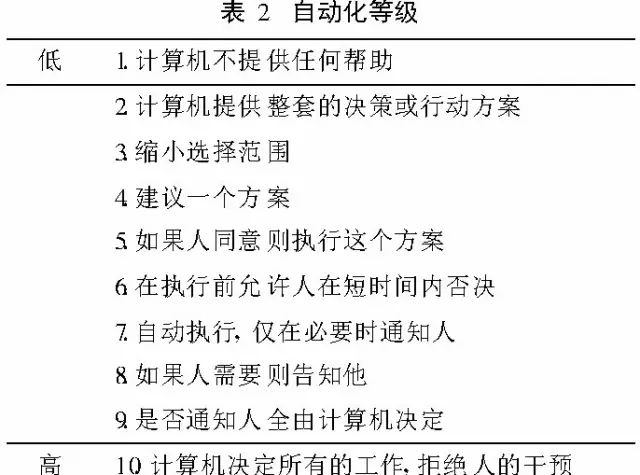
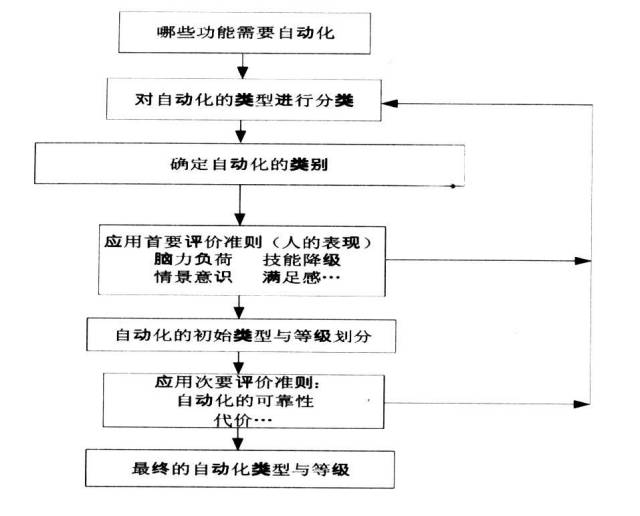
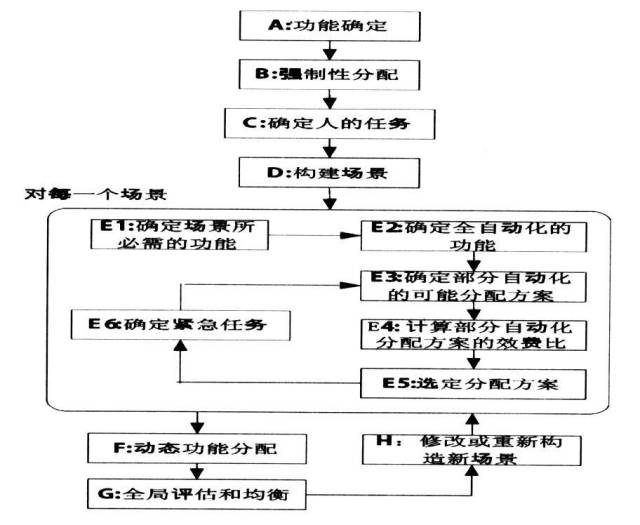
Abstract: Functional allocation is an important part of the process of designing complex human-machine intelligent systems. It requires the application of system analysis methods, and reasonably performs both the human and the machine task assignment and the scientific design of both functional combinations. This paper analyzes the research status and existing problems of function allocation at home and abroad. For the design requirements of complex human-machine intelligence system, the research direction of the system function allocation method is pointed out. I. Introduction In a complex intelligent human-machine system, there are two intelligent individuals—people and intelligent machines. This kind of man-machine system and traditional man-machine system are very different in compositional structure and internal mechanism. It is a man-machine-integrated intelligent system, with intelligence, openness, complexity, and sudden appearance. In order to study this system, well-known American scholars Lenat and Feigenbaum proposed the concept of Man-Machine Intelligence System [1], similar to Sheridan's concept of human-automation. Qian Xuesen, a well-known Chinese scientist, and Dai Yan of the Chinese Academy of Sciences proposed the idea of ​​man-machine integrated integration [3, 4]. Lu Yongxiang and Chen Ying from Zhejiang University proposed the theory of human-machine integration [5, 6]. Long Shengzhao et al. proposed the man-machine-environment system engineering theory, which all provide a large number of theoretical basis for the research of man-machine intelligence system. Although there is currently no unified and rigorous theoretical system for studying complex human-machine intelligence systems, it is possible to find common ground from the above methods, that is, humans must be considered during the entire life cycle of the system design from the beginning to the system implementation. The relationship between machines and rational allocation of human-machine functions is the key to embody the intelligence of complex human-machine systems. Second, the concept of functional distribution As early as 1951, Fitts explicitly proposed the concept of functional distribution for the first time [8]. It refers to the process of assigning a function or task in a system to a person or a machine. This function allocation activity occurs in the early stages of the system synthesis and evaluation process, and therefore belongs to the system engineering research category. The function distribution here mainly emphasizes the functional decomposition between system components. Later, due to the development of machinery, automation, and computer technology, most of the systems belonged to man-machine systems. The allocation of functions in such system design tasks requires more and more consideration of human factors in the system, so it is dedicated to humans. Due to an important research content of the project, it is called human-machine function allocation. Since the concept of functional distribution was proposed, it has been widely used in the design of industrial and automation fields, especially in the design of complex systems such as nuclear power plant monitoring automation systems, air traffic control systems, aircraft cockpits, and manned space vehicles. Third, the research status of the function allocation method 3.1 Foreign Research The principle of allocation of functions is combined with a certain application background, and a variety of function allocation methods are gradually formed. Several functional distribution methods that are currently influential in the international are: human-computer capability comparison allocation method, Price decision graph method, Sheffield method, automated classification and hierarchical design method, York method, etc. 3.1.1 Human-Computer Capability Comparison Allocation Method It is the initial function allocation method, such as the well-known Fitts Lists distribution method, which is the most common method used so far, and has gained a lot of applications in the early simple industrial automation monitoring system. Table 1 is the respective advantages of the man-machines listed by Fitts, also known as the MABA-MABA method. 3.1.2 Price Decision Diagram Method The Price Decision Diagram [9] compares the features of any one function, from the two aspects of human and machine, and then makes an assessment based on performance, speed, reliability, technical feasibility, etc. The evaluation result is a complex value (human performance The value is the real part and the performance value of the machine is the imaginary part). This complex value falls in a certain area of ​​the decision graph, as shown in Figure 1. Figure 1 Price decision diagram The decision map consists of six regions, each corresponding to a different human performance and distribution plan: 1 indicates that the function is assigned to the machine; 2 indicates that the function is assigned to the machine; 3 indicates that it can be assigned to the person and can be assigned to the machine. , There is an optimal distribution point; 4 assigns the function to people; 5 assigns the function to people; 6 uses other methods to redesign. Although the Price decision method further defines the process of human-machine function allocation based on the FittsLists distribution method, it does not explicitly describe how to calculate performance, and it is difficult to objectively calculate the performance of people and machines. 3.1.3 Sheffield Method The Sheffield method is a functional distribution method developed by the University of Sheffield in the United Kingdom in the design of the Navy's naval control system. In the distribution process, it needs to consider more than 100 decision-making criteria and divide it into 8 groups. It not only considers the human-machine capability characteristics, but also considers the personnel's job design, sociality, training, and safety from the perspective of human factors engineering. Other factors include the accuracy and cost of automation. Its main flow is shown in Figure 2. Figure 2 Sheffield flow chart The advantage of the Sheffield method is that the factors considered are more comprehensive and include the static and dynamic function allocation process of the system. It is mainly aimed at the design of a naval vessel control system, so it also considers the allocation of functions among the naval operators. However, it also has obvious shortcomings. First, because too many factors are considered, the design task can not be operated due to lack of relevant information. Secondly, the Sheffield method must be decomposed into functions that can be fully allocated to people or machines, that is, fine enough granularity. Operations can only be implemented, but this is often not possible in a complex system. 3.1.4 automated classification and grade design method This method was proposed by British scientists Parasuraman and Sheridan [11] and was mainly used in industrial automation systems such as nuclear power plant monitoring. This method considers that the working process of any human-machine automation system is similar to human information processing and can be divided into four steps: acquisition, analysis, decision-making, and action. The degree of automation of the machine is divided into 10 consecutive levels as shown in Table 2. On this basis, the system functions are classified according to the above four steps, and the degree of automation is determined for the functions that belong to each category. Then, multi-level evaluation criteria are established to gradually modify the distribution results until the system is finally determined to be used. Automation type and rating. The flow chart is shown as 3. Figure 3 Flow chart for automated classification and rating design It was proposed by Dearden et al. of York University in the United Kingdom to propose a Scenario-based function allocation method [12] originally developed for the design of naval vessels, which was successfully achieved after achieving better results. Used in single-seat aircraft's functional distribution design. The basic steps of the York method are shown in Figure 4. Figure 4 York process flow chart This design method also takes into account the environmental factors of the function runtime, and therefore it is a more complete function allocation method. However, it does not consider the allocation of functions among people in the system. 3.2 Domestic research Domestic research on the allocation of functions is still in its infancy. Zhang Wei and others from the West Industrial University studied the dynamic allocation of man-machine functions of combat UAV systems [13] , proposing principles and methods for man-machine function allocation of UAV ground control systems, focusing on remote UAV monitoring systems. The factors considered in the allocation of functions are still relatively simple and are not suitable for the design and research of complex systems. Zhou Jiaxiang and others conducted research on the distribution of manned spacecraft[14], which provided a certain basis for the optimal design of human-machine-based optimal allocation of manned spacecraft. However, some of the model's initial input data is difficult to obtain, which has a direct impact on the final allocation of results. IV. Problems At present, the main problems existing in the system function allocation method and its application are as follows [15]: (1) The distribution method is less versatile. The range of applications for function allocation is extremely wide. In the respective fields, the application environment, the nature of the tasks, and the technologies involved are not the same, and the distribution standards are not uniform. As a result, the function allocation methods in various fields cannot be well compatible and shared with each other. Greatly limit the application of function allocation in engineering. (2) The distribution standard is simple and the distribution process is relatively simple. In practical engineering applications, function allocation is often the most easily overlooked part. Even considering function allocation at the beginning of design, only a single standard, such as system load or cost, is selected. The simplification of allocation criteria will inevitably also lead to simplification of the distribution process. The system designed in this case may cause a single index of the entire system to be higher, but other indicators are lower, so the overall performance often fails to meet the design criteria. (3) The combination of function allocation process and design process is not tight enough, there is no method of engineering, and there is insufficient consideration of environmental factors. The traditional function allocation method considers the function allocation as a separate process, and is not tightly integrated with the system engineering design, and requires the participation of function allocation experts. However, it is more difficult for the ordinary designers to participate in the function allocation. The disconnection between distribution and engineering design increases design costs. In addition, due to insufficient consideration of environmental factors, the system does not have sufficient dynamic adjustment capabilities when the system is put into use, and may cause the system to crash or fail. Fifth, the research direction of the functional allocation method of complex human-machine intelligence system The most important feature of the complex human-machine intelligence system is that there are three levels of information coupling between human and computer: perception, decision-making and execution. It requires that the human and machine functions can be dynamically adjusted during the operation of the system, and different levels of intelligence are reflected at different stages of the task. Therefore, it is difficult to meet the design requirements of complex human-machine intelligent systems by applying a single function allocation standard and method. According to the existing methods, the following suggestions are proposed for the functional allocation method of complex human-machine intelligent systems: (1) The characteristics of people and machines in the system must be analyzed to determine the influencing factors of the function allocation. The "machine" in the complex human-machine intelligent system is a broad concept and includes all kinds of hardware and software facilities other than people, such as machinery, automation, and computers related to the system task. The person in the system should refer to a group of people. First of all, he has the physiological characteristics of the average person. Secondly, because of training and learning, he has the characteristics of a professional. Finally, there are personal differences between different people. So we need to focus on the characteristics of people. Based on the analysis of human and machine characteristics, select the factors that affect the function assignment, that is, the specific constraints, such as reliability, cost, performance, etc., for the machine, and work load and psychological pressure for the person. Physiological limits, reliability, etc. (2) Before the function allocation, the function analysis must first be combined with the system task scenario, which is the basis for all subsequent allocation activities. The purpose of the functional analysis is to determine the specific design criteria, which down-splits the requirements of the system hierarchy into sub-systems, and identifies the hierarchical structure required to enter the design criteria and/or constraints of the various elements of the system. Ultimately we were able to determine the set of objects assigned to the function in each task scenario. Obviously different task scenarios, function allocation object set is not the same. For an intelligent system, each function should be classified and the possible degree of intelligence of each type of function determined, and their combination constitutes the basic scheme of function allocation. (3) Function allocation includes both static function assignments and, more importantly, dynamic function assignment procedures. In the static function allocation stage, the necessary initial data related to allocation criteria (these data are used to evaluate the performance of a person or a machine to perform this function) are lacking, and the real environment of the task cannot be constructed. Therefore, we can only take some pre-estimation methods, make predictions of each and every distribution scheme in a specific task environment, make predictions of human and machine performance and other influencing factors, and then evaluate which scheme is most appropriate, and then describe the person at the time. Machine relations. In the dynamic allocation stage, the merits and demerits of the function allocation scheme can be evaluated through human-machine performance experiments through simulation or prototype systems, and modifications and adjustments can be made. 6. Conclusion After decades of development, the theory and methods of functional distribution have achieved fruitful and effective results in the field of industrial automation. With the advancement of science and technology, automation systems have gradually evolved toward complex human-machine intelligent systems. This poses higher requirements for the design and synthesis of the system, and in particular poses new challenges to the function allocation of the system. To this end, system researchers must use systems engineering thinking, mathematical methods, and modeling theory to design, analyze, model, and optimize the entire large system, including humans, from a systems theory perspective. Distribution, make full use of the respective advantages of man-machine, thus establishing a truly complex man-machine intelligence system.
Electric dc motors were the
first type widely used, since they could be powered from existing
direct-current lighting power distribution systems. A electric Dc Motor's speed can be controlled over a wide range, using either a variable supply
voltage or by changing the strength of current in its field windings. Small electric dc motor are used in tools, toys, and appliances. The universal motor
can operate on direct current but is a lightweight motor used for portable
power tools and appliances. Larger electric dc motor are used
in propulsion of electric vehicles, elevator and hoists, or in drives for steel
rolling mills.
Areas of application: the electric dc motor rotor part of the armature iron core, armature, commutator, such as equipment, electric dc motor is suitable for most electronic products, such as electric screwdriver, laser, smart home, gas valve, etc
Applications:
Method of use: the best stable in
horizontal plane, installed on theelectric dc motor output
shaft parts, cannot use a hammer to knock, knock prone to press into the electric
dc motor drive, may cause damage to internal components, and cannot be
used in the case of blocked.
Operating
temperature range:
Electric dc motor should be used at a temperature of -10~60℃.
The figures stated
in the catalog specifications are based on use at ordinary room
temperature catalog specifications re based on use at ordinary room
temperature (approximately20~25℃.
If a electric dc motor is used outside the prescribed temperature range,the grease on the gearhead
area will become unable to function normally and the motor will become unable
to start.Depending on the temperature conditions ,it may be possible to deal
with them by changing the grease of the motor's parts.Please feel free to
consult with us about this.
Storage
temperature range:
Electric dc motor should be stored ta a temperature of -15~65℃.
In case of storage
outside this range,the grease on the gearhead area will become unable to
function normally and the motor will become unable to start.
Service life:
The longevity of
geared motors is greatly affected by the load conditions , the mode of
operation,the environment of use ,etc.Therefore,it is necessary to check the
conditions under which the product will actually be used .The following
conditions will have a negative effect on longevity.Please consult with us
should any of them apply.
â—Use with a load
that exceeds the rated torque
â—Frequent starting
â—Momentary reversals
of turning direction
â—Impact loads
â—Long-term
continuous operation
â—Forced turning
using the output shaft
â—Use in which the
permitted overhang load or the permitted thrust load is exceeded
â—A pulse drive
,e.g.,a short break,counter electromotive force,PWM control
â—Use of a voltage
that is nonstandard as regards the rated voltage
â—Use outside the
prescribed temperature or relative-humidity range,or in a special environment.
â—Please consult with
us about these or any other conditions of use that may apply,so that we can be
sure that you select the most appropriate model.
when it come to
volume production,we're a major player as well .each month,we rurn out
600000 units,all of which are compliant with the rohs directive.Have any
questions or special needed, please contact us, we have the engineer group and
best sales department to service to you Looking forward to your inquiry. Welcome
to our factory.
Electric Dc Motor,Mini Electric Motor,12V Electric Motor,Electric Motor Gearbox Shenzhen Shunchang Motor Co., LTD. , https://www.scgearmotor.com