FOC (field-oriented control) is a magnetic field steering control, also known as vector control. It is a technology that uses a frequency converter (VFD) to control a three-phase AC motor. It adjusts the output frequency and output voltage of the inverter. Size and angle to control the output of the motor. Its characteristic is that it can individually control the magnetic field and torque of the motor, similar to the characteristics of its exciting DC motor. Since the three-phase output current and voltage are represented by vectors during processing, they are called vector control. K. Hasse of the Darmstadt University of Technology and F. Blaschke of Siemens introduced the concept of vector control in the 1968 and early 1970s, respectively. Hasse proposed indirect vector control, and Blaschke proposed direct vector control. Leonhard further of the Braunschweig University of Technology further developed magnetic field-oriented control, so AC motor drives began to have an opportunity to replace DC motor drives. At that time, the microprocessor was not commercialized, but a general-purpose AC motor driver has appeared. At that time, compared to DC motor drives, AC motor drives were costly, complex, and difficult to maintain. At the time, vector control required many components such as sensors and amplifiers, so vector control could not be applied to AC motor drives. Parker transform has been used in the analysis and research of synchronous motors and induction motors, and is the most important concept to understand magnetic field steering control. This concept was coined by Robert Park in his 1929 paper. The Parker Transform is listed as the second most important paper in the 20th century publication of power electronics related papers. The importance of the Parker transform is that the motor-dependent differential equation can be changed from a variable coefficient differential equation to a "time-invariant" coefficient differential equation. Vector control can be applied to AC induction motors and DC brushless motors. The purpose of early development is for high-performance motor applications. It can operate over the entire frequency range, output rated torque at zero speed of the motor, and fast acceleration and deceleration. However, compared with the DC motor, the vector control can be used with the AC motor. The motor is small in size, low in cost and energy consumption, and therefore has begun to attract industry attention. In addition to being used in high-performance motor applications, vector control has also been used in some home appliances. The vector control core technology of the VFD-VE series is FOC (Field Oriented Control), which is known in the industry as magnetic field steering control or magnetic beam vector control. More and more motor drivers use magnetic field steering control because it allows the motor to be in any Working at the best torque all the time, so you can get higher efficiency, it has better dynamic response, can achieve very precise variable speed control, and has lower torque ripple. Provides consistent and stable motor rotation when the motor is started, running, and stopped. Let me briefly explain what is vector control. The principle is that the energized wire satisfies the left-hand rule in the magnetic field and is subject to a force. The rotor of the PSMS motor is permanent magnet steel, and the stator is several The basic control of the FOC is that the current flowing on the stator side of the å¯ä»¥ phase can be combined into an equivalent composite current vector whose angular angular velocity is the angular frequency ω of the input power source. This current vector can be mapped to a two-axis rotary coordinate through coordinate conversion techniques. If the two-axis coordinates are also rotated at the angular velocity ω, the current vector in this coordinate can be regarded as stationary; in other words, the current vector is DC in this coordinate, since it is DC, this allows The motor torque is proportional to the current, but some conditions must be met, including the rotor flux of the motor must coincide with the d-axis in the figure, and the d-axis component of the current vector must be maintained at a constant value. After satisfying the above conditions, the torque of the AC motor will be proportional to the stator current, so controlling the vector value of the stator current can be as simple and precise as controlling the DC motor. Working principle diagram 1, collecting two-phase current 2. After the Clarke transform, the two-axis orthogonal current is obtained. 3. After the rotation transformation, the orthogonal current quantities Id and Iq are obtained, wherein Iq is related to the torque, and Id is related to the magnetic flux. In actual control, Id is always set to zero. The two quantities obtained are not time-varying, so these two quantities can be controlled separately, similar to DC quantity control. It is not necessary to know the specific voltage of the three phases of the motor. 4. The Iq and Id quantities obtained in the third step are respectively sent to the PI regulator to obtain corresponding outputs Vq and Vd; 5. Obtain the angle at which the motor turns through the sensor. 6. Perform inverse-park transformation to obtain the amount of biaxial current. 7. Perform inverse clarke transformation on Va and Vb in step 6, and obtain the actual required three-phase voltage input to the inverter bridge to drive the motor to rotate. With more than 15+ yrs rich MFG experience, you can definitely trust in and cooperate with. infrared thermometers wholesale, forehead thermometer wholesale,wholesale thermometer suppliers TOPNOTCH INTERNATIONAL GROUP LIMITED , https://www.micbluetooth.com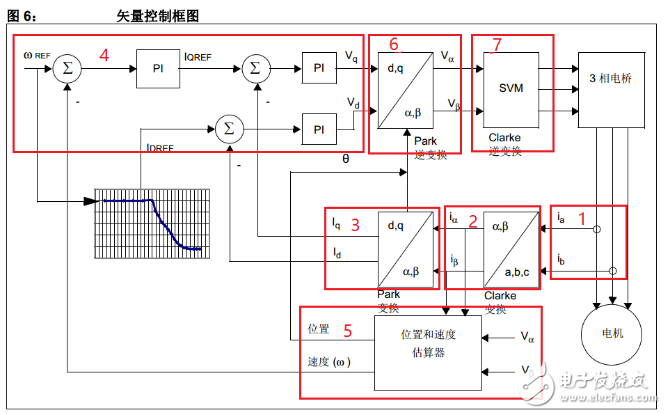
Provide you with the supply of Personal Protective Equipment. to help you safely get back to your daily routine.
Our products include pulse Oximeter Finger, Forehead Thermometer, Automatic foam soap dispenser, etc.
Our strict quality control protocol thoroughly vets every aspect of production, storage, and shipments all the way way to our end customers.